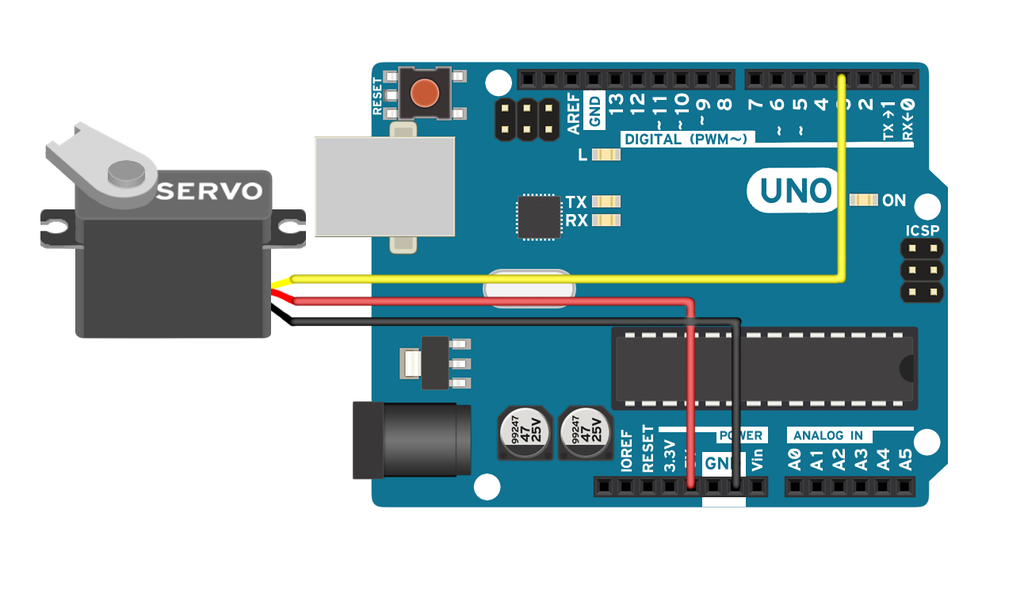
#include <Servo.h>
int servoPin = 3;
Servo Servo1;
void setup() {
Servo1.attach(servoPin);
}
void loop(){
Servo1.write(0);
delay(1000);
Servo1.write(90);
delay(1000);
Servo1.write(180);
delay(1000);
}

Code: void setup() { pinMode(2, INPUT);
Serial.begin(9600);
}
void loop() {
if (digitalRead(2) == HIGH)Serial.println("Sensor is touched");
delay(500);
}Stepper Motor:

1x Arduino Uno board
1x Stepper Motor
1x Stepper Driver
2x Resistor
9x Jumpers
Code:
#include <Stepper.h> //including stepper motor library
int stepIN1Pin = 8;
int stepIN2Pin = 9;
int stepIN3Pin = 10;
int stepIN4Pin = 11;
int stepsPerRevolution = 2048; // amount of steps per revolution
const int button1Pin = 2; // pushbutton 1 pin for clockwise rotation
const int button2Pin = 3; // pushbutton 2 pin for counter clockwise rotation
Stepper myStepper(stepsPerRevolution, stepIN1Pin, stepIN3Pin, stepIN2Pin, stepIN4Pin);
void setup() {
pinMode(button1Pin, INPUT);
pinMode(button2Pin, INPUT);
myStepper.setSpeed(15);
}
void loop() {
int button1State, button2State;
button1State = digitalRead(button1Pin);
button2State = digitalRead(button2Pin);
if (((button1State == LOW) && !(button2State == LOW))) // if we're pushing button 1 OR button 2
myStepper.step(stepsPerRevolution/8);
if (((button2State == LOW) && !(button1State == LOW))) // if we're pushing button 1 OR button 2
myStepper.step(-stepsPerRevolution/8);
}
No comments:
Post a Comment